故障・修理
更新日:2019.06.25 / 掲載日:2019.06.25
フルタイム4WDのパートタイム4WDの違いとは
ドライバーによる切り替え操作を必要としないのがフルタイム4WD。手動切り替えによって2輪駆動と4輪駆動を選択するのがパートタイム4WD。
今ではフルタイム方式が4WDの主流となっている。
フルタイム4WD
前輪と後輪が常に繋がり、ドライバーの介入なしに4輪駆動となっているのがフルタイム4WD。この方式が成り立つ前提となっているのがセンターデフや前後駆動力配分機構。センターデフには複数の方式があり、LSDと組み合わされている。乗用4WDのほとんどがこの方式を採用している。
パートタイム4WD
通常は前後どちらかの車輪を駆動し、ドライバーが手動で切り替えることによって他の車輪にも駆動力が伝えられるのがパートタイム4WD。軍事用や産業用として開発され、一部のSUVにも採用されているが、現在では少数派となっている。
1900年代の初めに軍用車として開発されたのが4WDのルーツといわれている。ダイムラーについでアメリカではジープが開発された。ジープは第2次世界大戦をはじめ、地球上のあらゆる紛争地でめざましい機動力を発揮した。
しかし軍用ではない4WDの登場もそれと同じほど古い。1902年にレースやヒルクライムのために開発されたオランダのスパイカーはセンターデフと2速のトランスファーを備えていたし、アメリカではインディ500レース用としてミラーが登場した。GPレースも例外ではなかったし、F1でもロータス63、マクラーレンM7、マートラMS84がサーキットを走った。タイヤの進化とともにレースシーンから4WDは撤退し、4輪駆動といえば軍用車やそれをベースにしたヘビーデューティなものを連想するようになった。これらの4WDはトランスファーによって2輪駆動と4輪駆動を切り替えるものでパートタイム4WDといわれる。 乗用車に4WDを復活させたのは国内では富士重工が最初だ。レオーネバンに4WD機構を組み込んだ。しかしそれはパートタイム4WDであって、本格的なフルタイム4WDの登場は1980年のアウディ・クワトロまで待たなければならなかった。
フルタイム4WDは全自動。
パートタイムはドライバーが手動で切り替える。
フルタイム4WDはタイヤと路面の接地状況を回転センサーによって検知し、無駄のない最適なグリップが得られるように駆動力が配分される。センターデフの方式によっては通常は2輪駆動で走るものもある。

パートタイム4WDは通常は2輪駆動で走り、ドライバーがトランスファーレバーを操作すると4輪駆動に切り替わる。路面状況をドライバーが正確に把握する必要がある。
パートタイム4WDとフルタイム4WDの大きな違いはその名のとおり、常に4輪駆動になっているか、あるいは手動で2輪駆動と4輪駆動を切り替えるかにある。
パートタイム4WDは前後に駆動力を配分するトランスファーがあり、これを切り替えることによって2輪駆動と4輪駆動を選択できる。ドライバーが4輪駆動が不要だと思えば、それを操作して2輪駆動に変えられる。多くのパートタイム4WDはFR車をベースにしたもので、2輪駆動時はFRとなる。
フルタイム4WDはドライバーの意思と関係なく、前輪と後輪に駆動力が分配されるもので、常時4WD、オンデマンド4WD、アクティブトルクスプリット4WD、e-4WDに大分できるが、手動で2輪駆動に切り替えられるタイプもある。フルタイム4WDは前後で決められた配分の中で駆動力を分配し、オンデマンド4WDは通常は2WDで走り、駆動輪がスリップすると4WDとなる。アクティブトルクスプリット4WDは多板クラッチを電子制御し、走行状態に合わせてリアルタイムで駆動力を配分する。後輪の駆動にモーターを用いるものもあるし、ハイブリッド車では後輪専用の駆動モーターを搭載する車種もある。
国産車はスバル・レオーネ、初のフルタイムはセンターデフを付けたアウディ・クワトロ
4WDは長い間産業用や軍事用として使われていたが、1972年にスバル・レオーネバン4WDが登場してから、4WDは乗用車にも採用されるようになった。初期のスバルはパートタイム式だったが、レオーネの進化とともにフルタイム化される。 もう一台のパイオニアは1980年に登場したアウディ・クワトロだ。センターデフを採用し、ドライバーの操作なしに、常時、前後に駆動力を配分した。アウディは市販に先立ちWRCに参戦し、勝利を重ね、参戦2年目にチャンピオンシップを獲得し、ラリーの世界でFR車を過去のものとしてしまったのだ。現在のフルタイム4WDがあるのはクワトロの誕生があってのものといえる。
 1980年に発表されたアウディ・クワトロ。センターデフを採用したフルタイム4WDのバイオニア。
1980年に発表されたアウディ・クワトロ。センターデフを採用したフルタイム4WDのバイオニア。 1972年に発売されたレオーネ・エステートバン4WD。乗用車に4WDを復活させたパイオニアだ。
1972年に発売されたレオーネ・エステートバン4WD。乗用車に4WDを復活させたパイオニアだ。センターデフとフルタイム4WD
これなくしてはフルタイムは成り立たない。各社から様々な方式が採用されている。
パートタイム式は中間にトランスファーを設け、そこから前と後ろにプロペラシャフトを伸ばす。2WDと4WDの切り替えは手動で中間のトランスファーを操作する。トランスファーにはロー、ハイなど複数のギヤを内蔵するものもある。
前と後ろを繋ぐドライブトレインの中間にセンターデフが入れられている。働きは左右のタイヤの差動制御をするディファレンシャルと同じものだ。べべルギヤ式、トルセンデフ式、ビスカスカップリング式、電子制御式などがある。
直進中は左右のタイヤはほぼ同じ数で回転するが、旋回に入ると外輪と内輪では回転数に差が現れる。それを吸収するのがディファレンシャルだ。同じことは4WDにもいえる。旋回に入ると前輪と後輪に回転数の差が現れる。前後を直結にしたままだとこの回転差を吸収できず、旋回半径が短い時は互いのタイヤに影響を及ぼす。前輪のグリップが高い場合はリヤタイヤがグリグリと空転してしまうし、後輪のグリップが高い場合は前輪にブレーキをかける動きが発生してしまう。
パートタイム4WDは通常の走行では手動で2輪駆動にし、4WDを選択するのは低速域に限られるため大きな弊害は現れないが、フルタイム4WDでは低速から高速まで常に4WDで走るため、このような機構は成り立たない。
これを防ぐために設けられるのがセンターデフだ。前後のタイヤの回転数の差を吸収するセンターデフには、デフロックも必要になる。4本のタイヤのどれかが浮き上がったり、路面抵抗の低い部分に乗って空転すれば、ロックなしではすべてのタイヤに駆動力が伝わらなくなるからだ。現在のフルタイム4WDは様々な差動方式を使い、ロック機構も一体で組み込まれている。
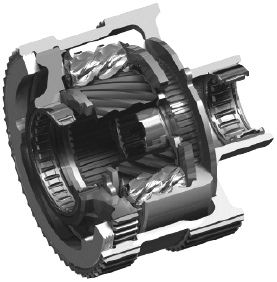 センターデフとして用いられるトルセンデフ。前後の駆動力配分だけでなく、前、あるいは後ろのどちらかが空転した場合LSD機能も発揮する。
センターデフとして用いられるトルセンデフ。前後の駆動力配分だけでなく、前、あるいは後ろのどちらかが空転した場合LSD機能も発揮する。フルタイム4WDの駆動力配分機構
前輪と後輪に駆動力を配分。
様々な分配機構が使われている。
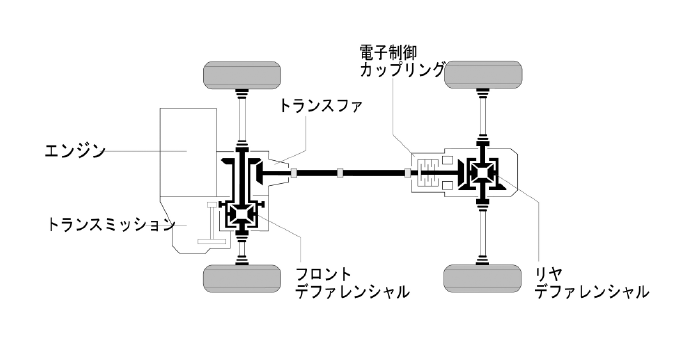 電子制御多板クラッチで駆動力を配分する機構。クラッチ接続の強弱で駆動力の大小を精密に制御でき、2WDにもできる。この方式を採用するクルマが増えている。
電子制御多板クラッチで駆動力を配分する機構。クラッチ接続の強弱で駆動力の大小を精密に制御でき、2WDにもできる。この方式を採用するクルマが増えている。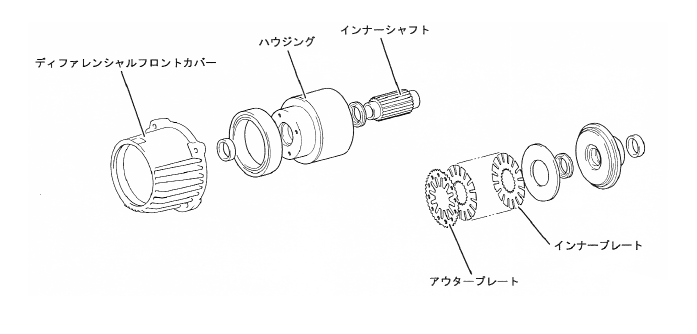 ケースの中に複数の板を組み合わせ、フルードで密閉したビスカスカップリング。前後の回転差が大きくなるとフルードの剪断抵抗が高まり、自動的に駆動力が配分される。
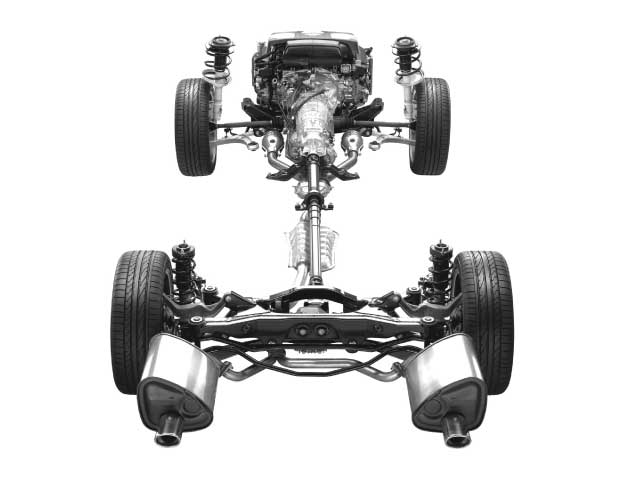
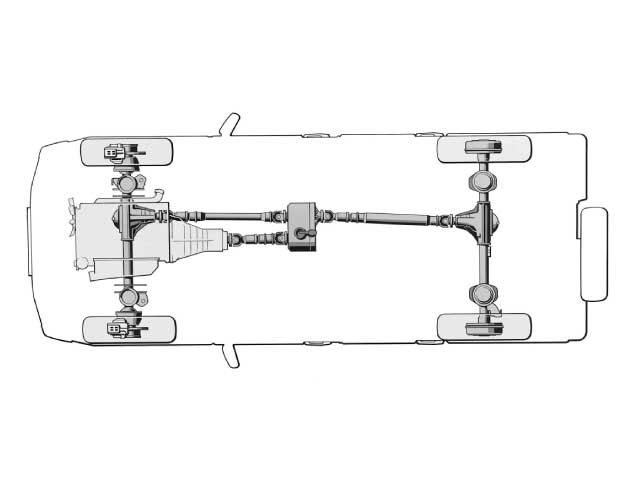
ケースの中に複数の板を組み合わせ、フルードで密閉したビスカスカップリング。前後の回転差が大きくなるとフルードの剪断抵抗が高まり、自動的に駆動力が配分される。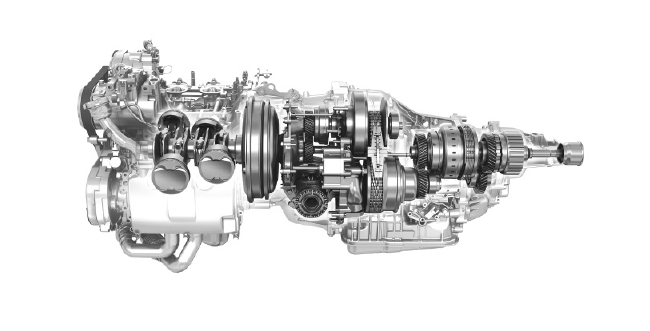 スバルの水平対向エンジンと組み合わされる4WD機構。フロントの左右とリヤプロペラシャフトの駆動機構が組み込まれている。
スバルの水平対向エンジンと組み合わされる4WD機構。フロントの左右とリヤプロペラシャフトの駆動機構が組み込まれている。 フルタイム4WDには様々な前後駆動力配分機構とLSD機構が組み込まれている。代表的なものがプラネタリーギヤ+多板クラッチ、ベベルギヤ+ビスカスカップリング、トルセンデフの3種だ。トルセンデフには差動機能に加えてロック機能も発揮するという特徴があり、VW、アウディなどが採用する。
通常は2輪駆動で、必要に応じて4WDに変わるオンデマンド式ではビスカスカップリングが代表的なもので、採用車種も多い。ケースの中に多板クラッチが交互に内蔵され、専用フルードで満たされている。前後の回転差が大きくなるとフルードの剪断力が高まり、回転差に応じた駆動力を伝えるというシンプルな方式で、LSD機能も発揮する。類似のものとしてロータリーブレードカップリング、ハイドロカップリングがある。ホンダでは独自のデュアルポンプ式を採用している。前後のプロペラシャフトの回転差によって作動する油圧ポンプによって多板クラッチの断続を行う。 アクティブトルクスプリットも多板クラッチを使用するが、クラッチの断続、接続の強弱は電子制御で行われ、走行状況に応じた最適な駆動力配分が行われる。
フルタイム4WDの駆動力配分制御
前後の駆動力配分量がポイント。
車種に合わせて最適に制御している。
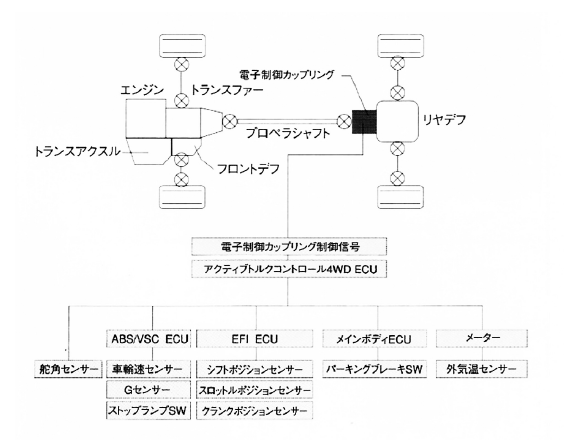 前後の駆動力配分は車輪速センサーからのタイヤ回転の不整信号を基本にするが、様々なセンサーからの情報を加え、車体を安全に導くように制御される。
前後の駆動力配分は車輪速センサーからのタイヤ回転の不整信号を基本にするが、様々なセンサーからの情報を加え、車体を安全に導くように制御される。 フルタイム4WDの駆動力配分には多くのバリエーションがある。ベベルギヤやトルセンをセンターデフに用いるものは50:50が多く、差動制限を0~100%まで行う。プラネタリーギヤをセンターデフに用いるものもあるが、この方式では前後の駆動配分の自由度が高く、35:65などというように、車種に合わせて設定される。
電子制御多板クラッチを用いたものでは基本駆動配分を決めたあと、走行状況に応じて最適な配分を行う。配分は前進するための駆動力に使われるだけではない。アンダーステアやオーバーステアに対し、それを緩和するような駆動力配分も行われる。 これらの制御の基本となっているのはセンサーからの情報だ。車輪速センサー、シフトポジションセンサー、スロットルポジションセンサーなどの他に最新4WDではヨーレートセンサーやステアリングセンサーと連携して、クルマがアンダーステアなのかオーバーステアなのを判断する。
駆動力配分はたとえばスバルでは60:40、49:51、45:55などと車種に合わせてきめ細かく設定される。スポーツカーではハンドリングを重視して基本を0:100のFR車として設定し、後輪の滑り、車両の姿勢に合わせて前輪に駆動力を伝えるものもある。
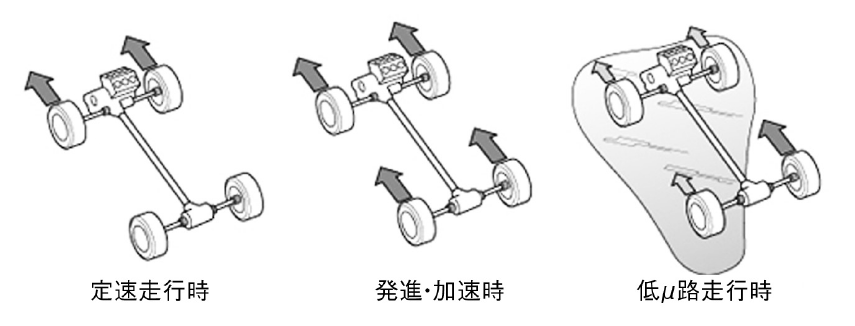
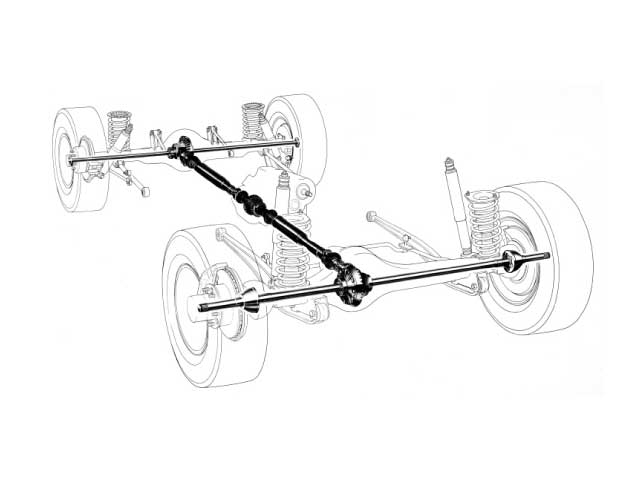
 前後の駆動力配分だけではなく、後輪の左右の駆動力を制御するものもある。良好な接地性が得られるだけでなく、積極的に操縦性に関わる制御も行われる。
前後の駆動力配分だけではなく、後輪の左右の駆動力を制御するものもある。良好な接地性が得られるだけでなく、積極的に操縦性に関わる制御も行われる。究極の駆動力配分を活用
4WDでないと勝てないWRCではヨーロッパ車が活躍しているが、いずれもラリー出場のために特別に作られたものだ。しかし日本では素晴らしいスーパー4WDが市販されている。ランサーエボリューション、GT-Rがそれだが、ランサーエボリューションはセンターデフに電子制御を採用し、基本的に50:50のトルクを配分し、差動制限はフリーから直結までを行う。さらに後輪デフに左右トルク配分機構を組み込み、走行状態やドライバーの操作に応じて左右のトルク差を最適に制御し、スタビリティとハンドリングを両立させている。
一方GT-Rはクラッチ、トランスミッション、トランスファーを一体にして後部に設置。トランスアクスル方式は以前からあったが、GT-Rのレイアウトは世界で初めてのものだ。駆動配分は前輪0、後輪100を基本にしたものだが、走行状態に応じて50:50まで配分され、さらにヨーモーメントがフィードバックされ、オンザレールに近い操縦性に味付けされている。
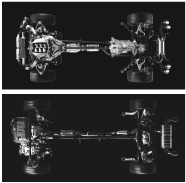
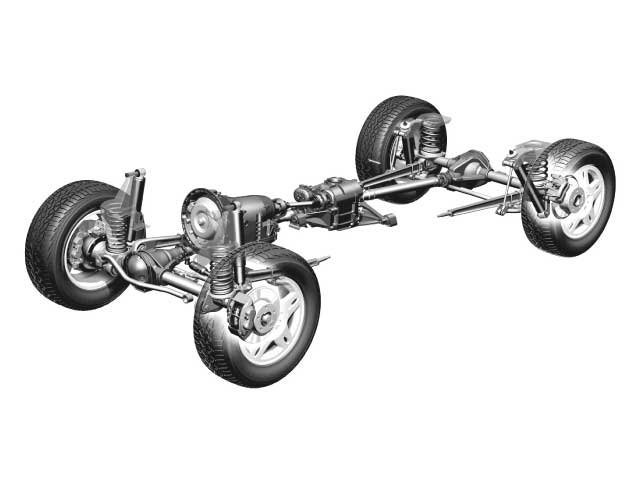
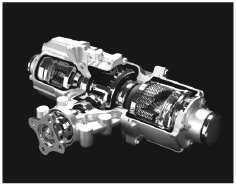
後部にクラッチとトランスミッション、駆動力配分機構を持った日産GT-Rのパワートレイン。基本を0:100とし、50:50まで制御し、高いスタビリティと操縦性を発揮させる。
前輪駆動をベースとしたランサーエボリューションの4WD機構。前後の駆動力配分だけでなく、後輪左右の駆動力も積極的に制御し、ハンドリングを向上させている。