車種別・最新情報
更新日:2021.06.02 / 掲載日:2021.05.10
トヨタ&レクサス「Advanced Drive」先取りチェック
トヨタ・ミライとレクサス・LSには強力な操舵支援機能は備わっているが、今回導入された「Advanced Drive‐アドバンスト ドライブ」は、そのさらに上、“自動運転”まで見据えたシステム。既存システムに比べてどのような進化を遂げたのか?じっくり見てみよう。

先日発売された現行ミライにも、車線維持制御LKAのLTAが標準で備わっているが、アドバンスト ドライブは周辺検知能力が高まったことに加え、ドライバーに信頼される運転操作も実現している。ソフトウェアをアップデートすることで、さらなる進化も可能となっていることも特徴の一つだ。
レベル2を超える機能がすでに実装済み

レベル2の運転支援機能を備えるトヨタ・セーフティセンス/レクサス・セーフティシステム+(以下TSS)だが、それらからさらにレベルアップした、次世代運転支援機能「アドバンスト ドライブ」が、トヨタ・ミライとレクサス・LSに導入される。
TSSの運転支援は渋滞追従機能を備えた全車速型ACCと前走車追従機能を備えた走行ライン制御型LKAが主となるが、アドバンスト ドライブは高速道路における半自動操舵の車線変更支援やカーブ前自動減速、ナビと連動した分岐や出口への誘導等の機能が加わっている。ハンズオフ機能は高速本線上に限定され、ADASの格付けではレベル2(高機能)になる。
周辺監視用のハードウェアは、ミリ波レーダーとカメラ、ライダーで構成するが、レーダーやカメラもTSSとはレベルが違う。レーダーは前方と側方に、カメラは前方カメラに加えて、遠近の詳細画像を撮像できるロケーター望遠カメラを採用。ライダーは120度200mの検知範囲と高い分解能を発揮するスキャン方式となる。自車位置特定システムは3D高精度地図や衛星情報だけでなく、6軸センサーの航法演算や前方画像などを複合的に分析。これらにより自車周囲の交通状況監視や位置測定精度も飛躍的に向上させている。さらに前走車がITSコネクトを装備している場合は、システムに備わる車車間通信機能を用い、前走車の加減速操作を反映したより滑らかな追従走行を可能とした。
レベル2(高機能)ながらも、隣接車線車両の自走行車線への車線変更をスムーズにする車間距離制御を行ったり、隣接車線車を追い抜く時には車線内で逆側に走行ラインを寄せるなど、ドライバーの心理を汲み取った制御を行う。なかなか芸が細かい動きは、高度な制御ソフトとセンシング技術の賜だろう。
もうひとつ見逃せない機能が通信によるソフトウェアのアップデートだ。セキュリティ面の問題を解決してこその採用と思われる。現状の機能だけでもレベル2(高機能)にプラスαの機能と制御を持っており、装着されるハードウェア構成はレベル3にも十分に対応できることが予想できる。今後、制御ソフトウェアや地図データのアップデートによりレベル3機能が付加される可能性が高い。むしろレベル3機能を前提にした構成と考えたほうが適切だろう。ソフトウェアはハードウェアの限界とも関連するので、現状のハードでどこまで機能(ソフトウェア)が進化できるのかは判断できないが、長く使うユーザーにとっては、最新機能へのバージョンアップが可能なアドバンスト ドライブは、積極的に選ぶだけの意味があるだろう。
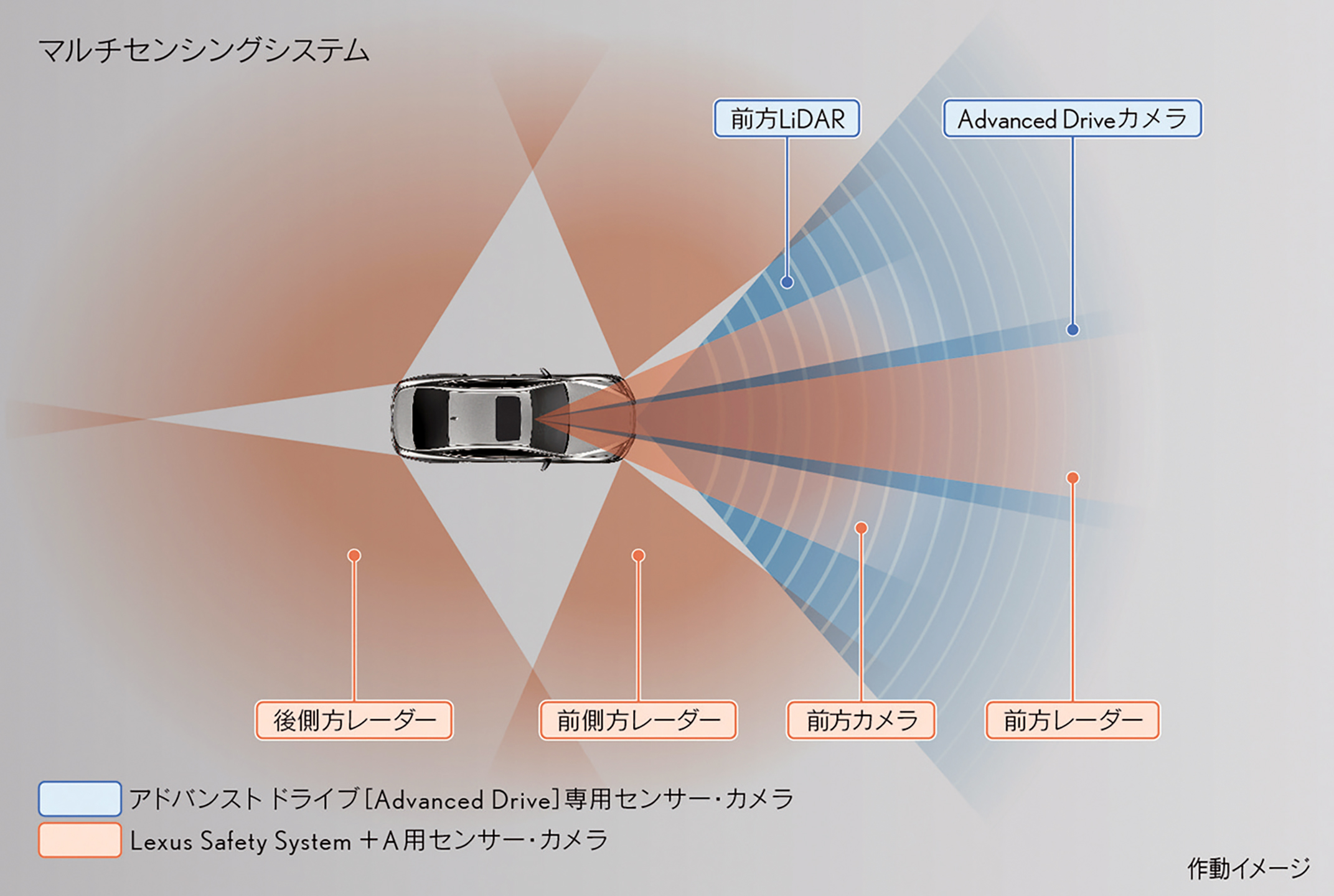
マルチセンシングシステムの作動イメージ。既存の検知システムにLiDARセンサーとドライブカメラを追加することで、前方方向のセンシング能力が高まっていることを確認できる。

アドバンスト ドライブは高速道路の本線上の走行を支援するシステム。ナビゲーションで目的地を設定すると、ドライバーの監視のもと、目的地の最寄りのICまで運転支援を行う。

アドバンスト ドライブの作動中は、メーター内のカラーディスプレイとカラーヘッドアップディスプレイに周辺のクルマの位置などがリアルタイムに表示される。
運転支援機の実力能は従来システムとは桁違い
●車線変更もシステムが代行
走行中にシステムが車線変更が望ましい道路状況と判断すると、ドライバーに車線変更の承認を求める。その後、ドライバーが承認操作を行うと、自動的に車線変更を行ってくれる。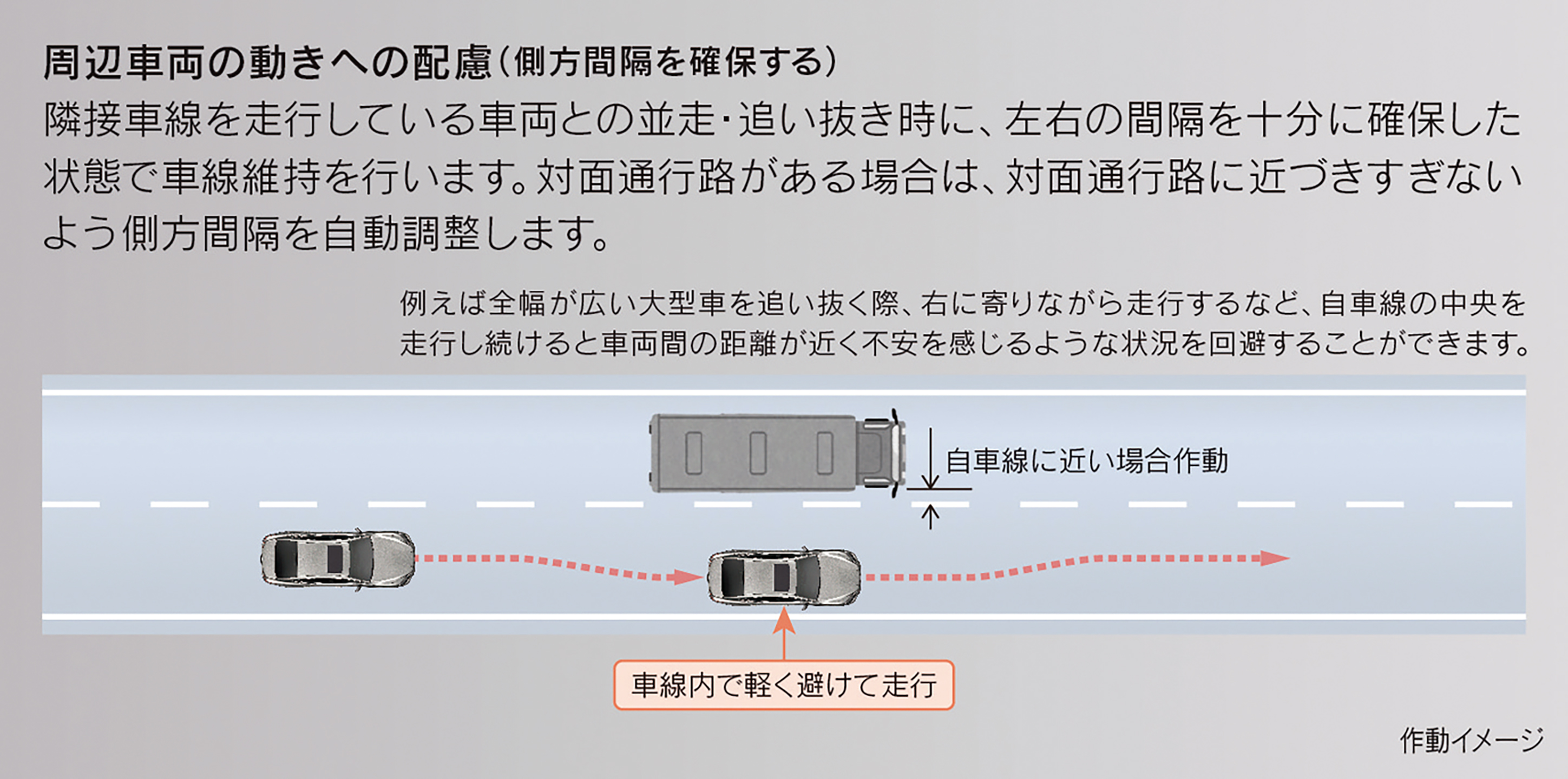
●隣車線のクルマとの距離間にも配慮
他の車両と並走、もしくは追い抜きの際には、左右の間隔を十分に確保して走行を行う。車幅がある大型車を追い抜く際には、右側に寄りながら走行するなど、車両間の距離が近くなる状況を回避してくれる。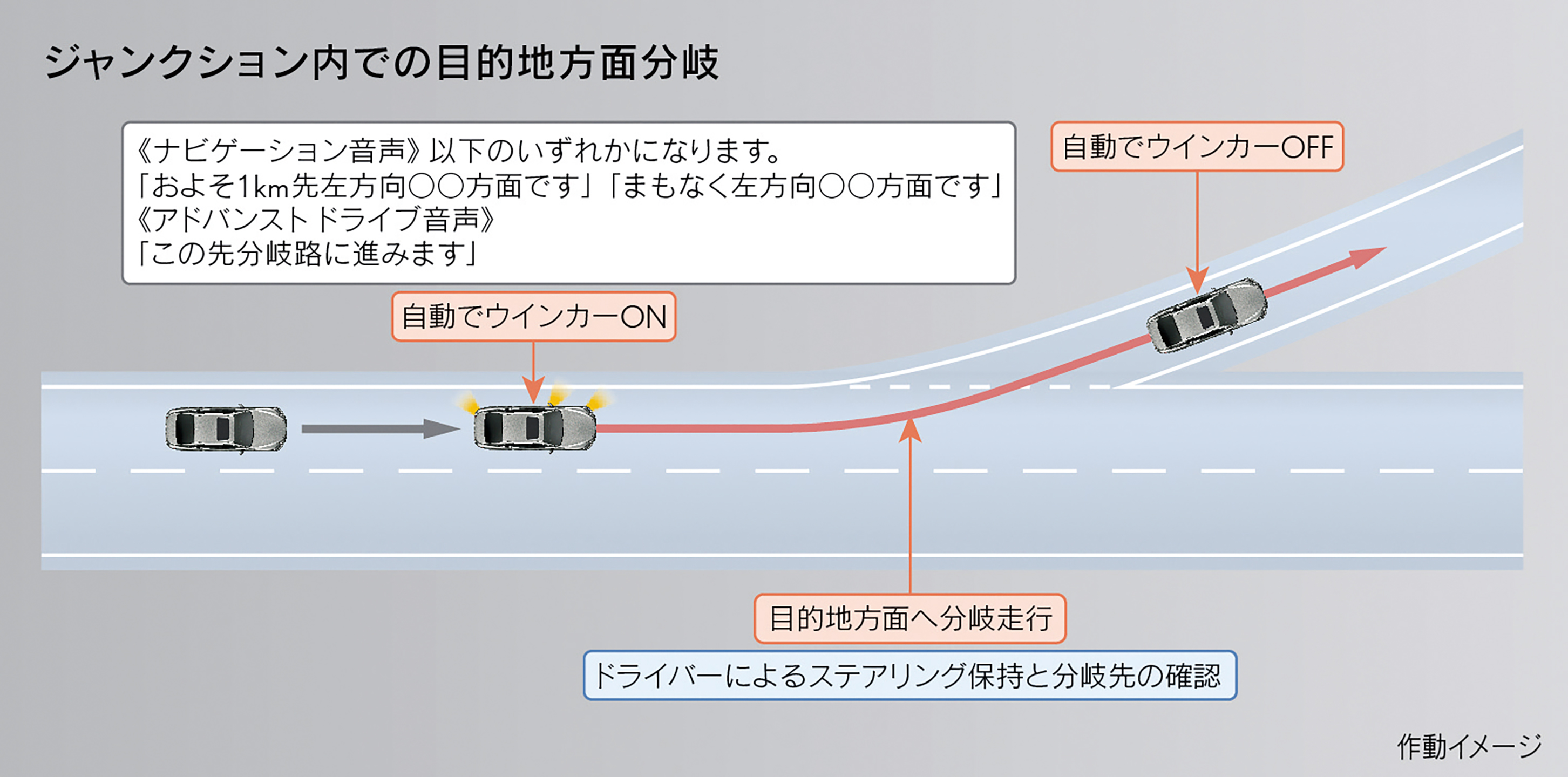
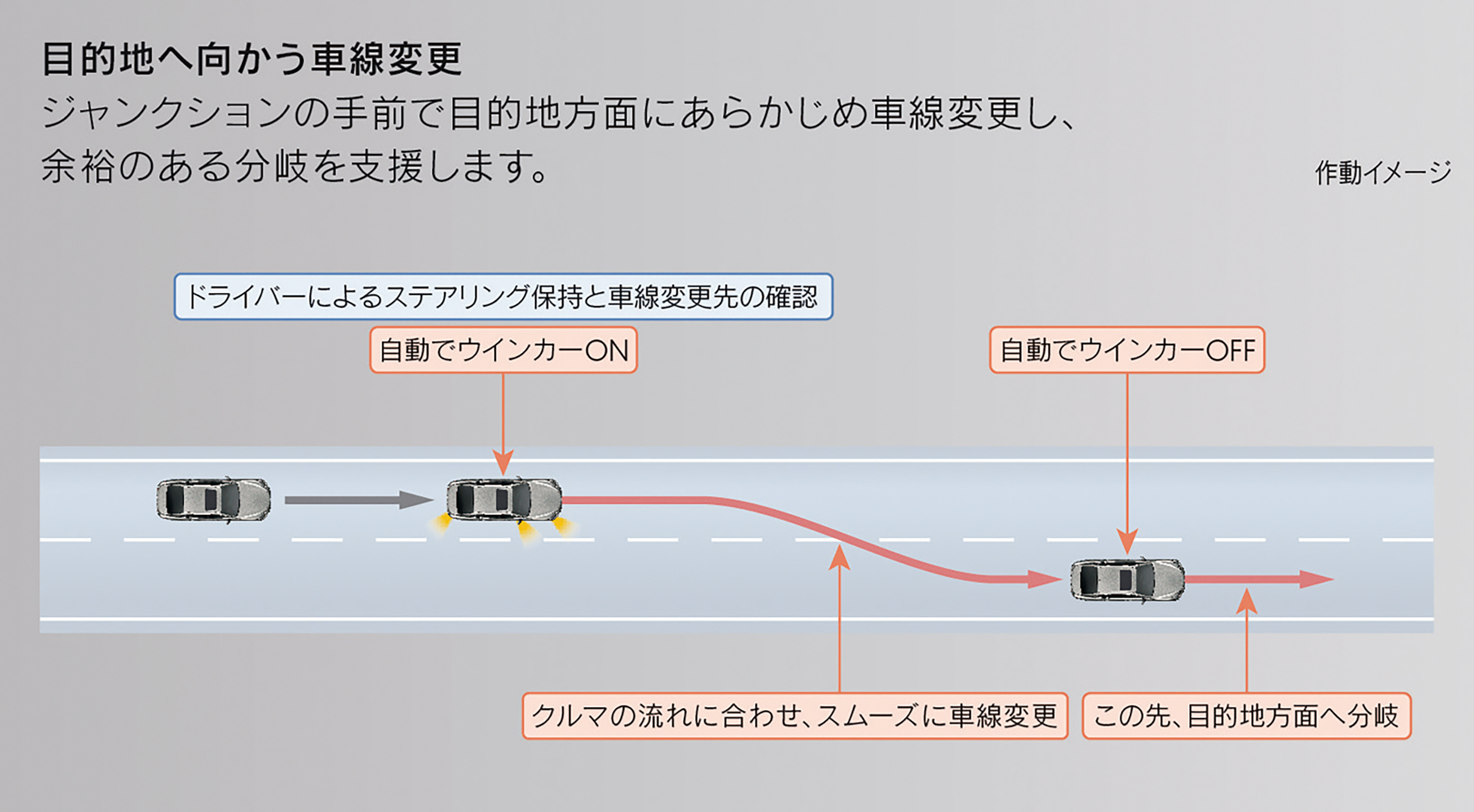
●ナビゲーションとの連携機能も強化
ナビゲーションで目的地を設定している場合、アドバンスト ドライブは目的地の最寄りのインターチェンジまで運転支援を行う。途中のジャンクションも目的地方面へ分岐走行してくれる。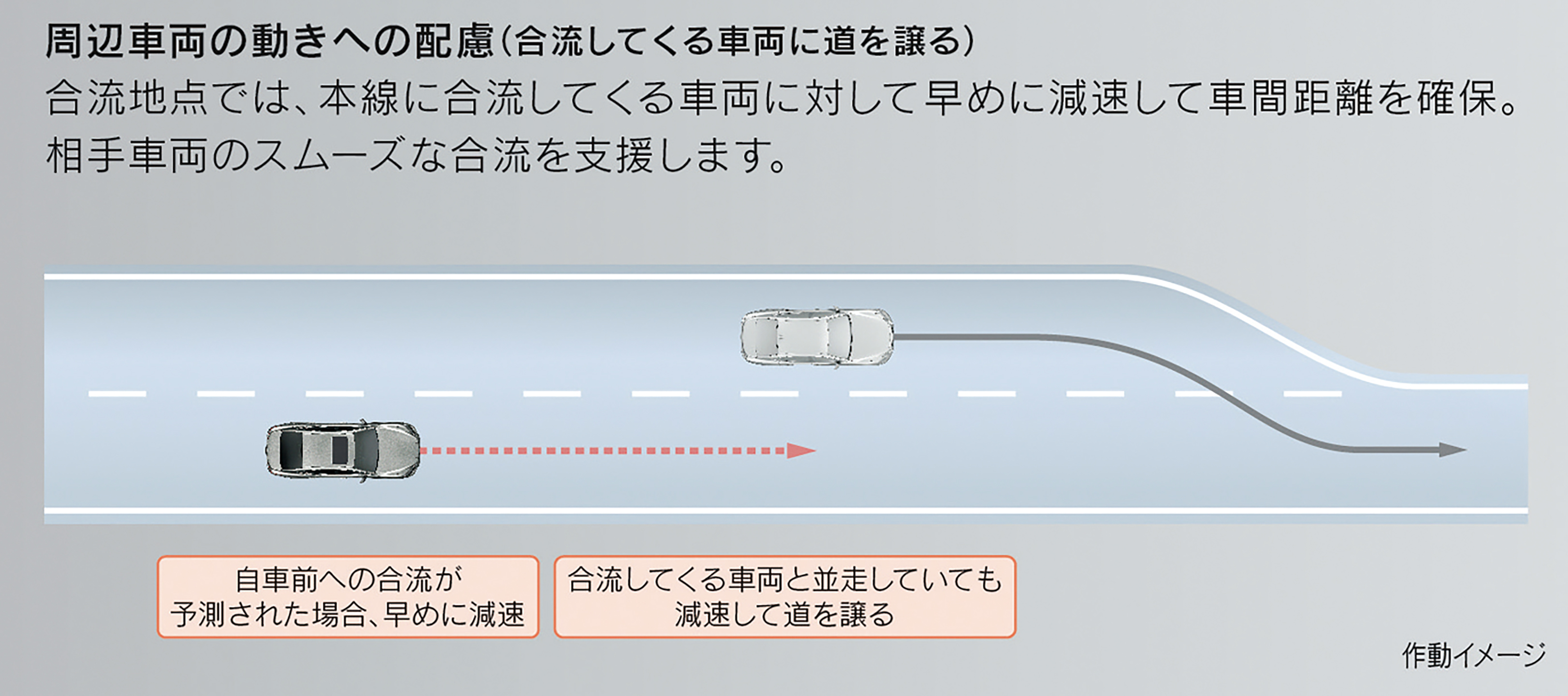
●他のクルマの動きにも配慮した運転を行う
インターチェンジの入口や車線の減少などで、自社の走行車線に合流してくる車両を認識すると、早めに減速して十分な車間距離を確保。相手車両がスムーズに合流できるよう支援する。
「Advanced Drive」を支えるメカニズム
●ロケーター望遠カメラ
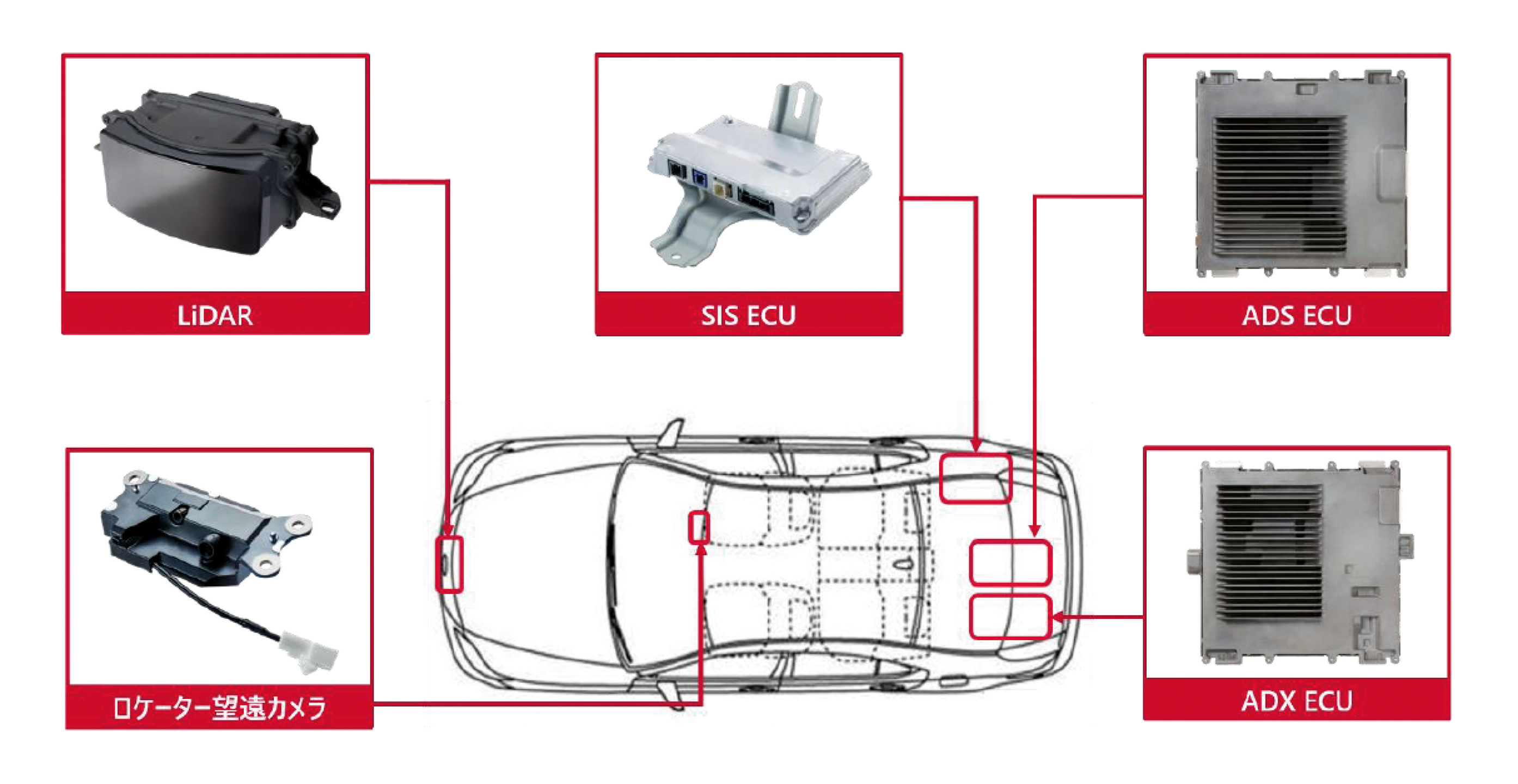
リアルタイムに高解像度画像を記録
地図情報や測位衛星情報との位置情報と照合させ自車位置の推定精度を高める画像を得るためのカメラ。幅広い距離での高い解像度を得るため近距離用と遠距離用の2種類のカメラを搭載している。自律型の位置推定システムのひとつだが、機能解説から推測する限り、その他のシステムを補完するための機能と思われる。
●ADS(ECU)&ADX(ECU)
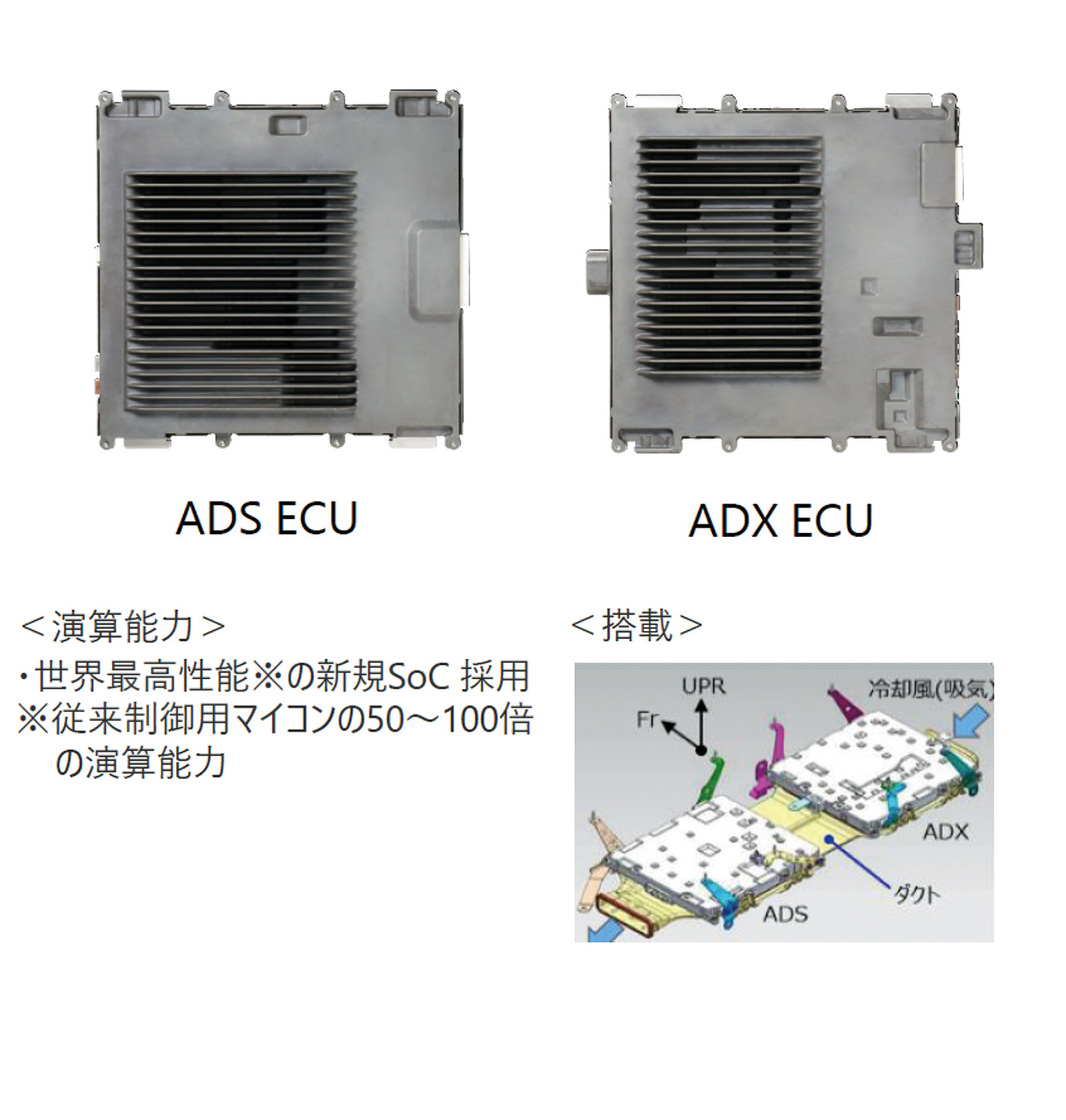
自動運転制御を指示する司令塔
SISで特定した位置情報や各種センサー類から得た周辺状況、さらに自車の走行状況から運転代行に類する支援制御を行うシステム。安全性を担保するためにSoC(1チップマイコン)の複数化や電源の二重化などが施される。自動制御を行う司令部のような機能を受け持ち、レベル3以上の自動化実現の要のひとつとなるユニットだ。
●LiDAR(ライダー)

レーザー光で対象物を精密に検知
電波を用いて対象物の位置を検出するレーダーに対して、電波の代わりにレーザー光を用いて検知を行うライダー。電波反射率が低く検知性能に優れる特徴を持つ。アドバンスト ドライブではミラー式の走査型を採用し、高出力発信器や高感度受信機の採用により世界最高レベルの検知角度120度、車両の検知距離200m以上を達成している。
●SIS(ECU)
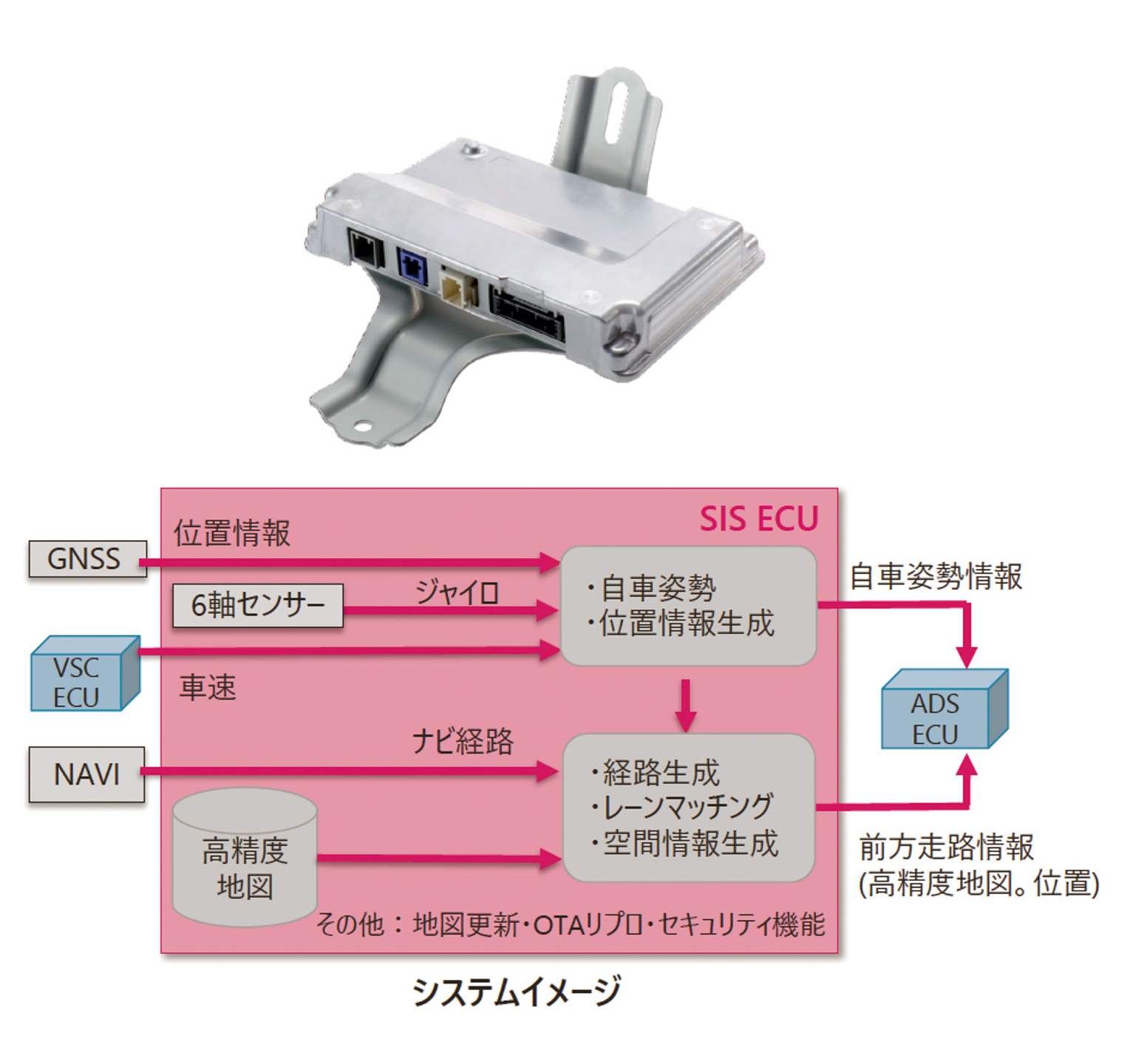
周辺&位置情報をリアルタイムに解析
各種センサーや位置衛星、カメラ画像、ナビからの情報を総合的に判断して自車位置を特定する演算システム。位置推定精度をさらに向上させるために車両の加速度や自転角速度を検出する6軸センサーや3D高精度地図を内蔵する。このシステムにより自車の走行する位置情報を車線レベルで収得することが可能になる。
ライタープロフィール
1977年の中古車情報誌GOOの創刊以来、中古車関連記事・最新ニュース・人気車の試乗インプレなど様々な記事を制作している、中古車に関してのプロ集団です。
グーネットでは軽自動車から高級輸入車まで中古車購入に関する、おすすめの情報を幅広く掲載しておりますので、皆さまの中古車の選び方や購入に関する不安を長年の実績や知見で解消していきたいと考えております。
また、最新情報としてトヨタなどのメーカー発表やBMWなどの海外メーカーのプレス発表を翻訳してお届けします。
誌面が主の時代から培った、豊富な中古車情報や中古車購入の知識・車そのものの知見を活かして、皆さまの快適なカーライフをサポートさせて頂きます。
1977年の中古車情報誌GOOの創刊以来、中古車関連記事・最新ニュース・人気車の試乗インプレなど様々な記事を制作している、中古車に関してのプロ集団です。
グーネットでは軽自動車から高級輸入車まで中古車購入に関する、おすすめの情報を幅広く掲載しておりますので、皆さまの中古車の選び方や購入に関する不安を長年の実績や知見で解消していきたいと考えております。
また、最新情報としてトヨタなどのメーカー発表やBMWなどの海外メーカーのプレス発表を翻訳してお届けします。
誌面が主の時代から培った、豊富な中古車情報や中古車購入の知識・車そのものの知見を活かして、皆さまの快適なカーライフをサポートさせて頂きます。
![]() SHARE
SHARE
![]() SHARE
SHARE